This document provides a brief intro of the usage of builtin functions and detectors designed for each App.
Grip Detection
Suction Detection
Inner Grip Detection

1. Output format
Field |
Description |
inner_grip |
num_grip x 4 where a grip g=[xc, yc, zc, w, score] |
best_inner_ind |
best grip index of inner grips |
best_n_inner_inds |
top n indexes of inner grips |
best_inner |
target inner grip selected from all inner grips |
im |
display grip on the input image |
2. Create and Load Detector
Using the default Kpick’s detector
from kpick.pick.inner_grip_detector import get_inner_detector_obj, InnerGripDetector detector = get_inner_detector_obj()(cfg_path=cfg_path)
Note
Please refer configs/inner_outer_grip.cfg
3. Modify and Load Detector
Extending the default Kpick’s detector
from kpick.pick.inner_grip_detector import get_inner_detector_obj, InnerGripDetector class AppDetector(InnerGripDetector): def new_function(self): print('new function') detector = get_inner_detector_obj(Detector=AppDetector)(cfg_path=cfg_path)
4. Demo on single RGB-D image
import cv2
from ketisdk.vision.utils.rgbd_utils_v2 import RGBD
# load model
detector = get_inner_detector_obj()(cfg_path='configs/inner_grip.cfg')
# load image
rgb = cv2.imread('data/test_images/inner_grip_rgb.png')[:, :, ::-1]
depth = cv2.imread('data/test_images/inner_grip_depth.png', cv2.IMREAD_UNCHANGED)
rgbd = RGBD(rgb=rgb, depth=depth, depth_min=600, depth_max=800,
denoise_ksize=detector.args.sensor.denoise_ksize)
rgbd.set_workspace(pts=[(424, 176), (976, 180), (971, 559), (426, 553)])
# predict
detector.args.flag.show_steps = True
ret = detector.detect_and_show_inner_grips(rgbd=rgbd, net_args=detector.args.inner_grip_net, args=detector.args,
remove_bg=detector.args.inner_grip_net.remove_bg)
# show
cv2.imshow('reviewer', ret['im'][:, :, ::-1])
cv2.waitKey()

5. Parameters tuning
Parameter |
Description |
grip_net.erode_h |
gripper plate’s width |
grip_net.grip_w_ranges |
ranges of gripper’s width, which are tuned for each target object |
grip_net.grad_thresh |
gradient threshold. Smaller value makes more grip candidates but noisy, and vice versa |
grip_net.remove_bg |
remove detected grips on the background or not |
grip_net.top_n |
top n target grips |
grip_net.dy |
Smaller value makes more dense grip candidates. |
grip_net.ellipse_axes |
Dimensions of ellipse that examines neighbor grips. For bigger object, dimension should be larger |
inner_grip_net.score_thresh |
Score threshold of inner grip detector |
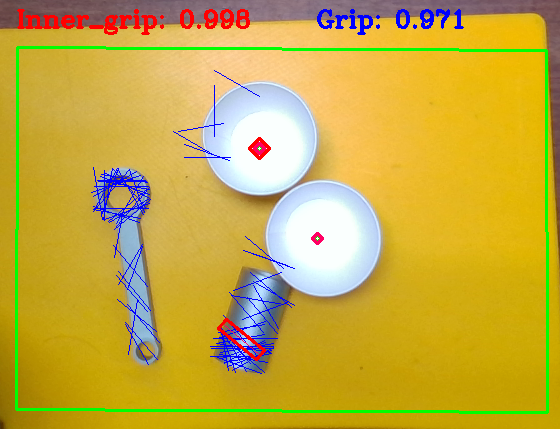
Inner and Outer Grip Detection
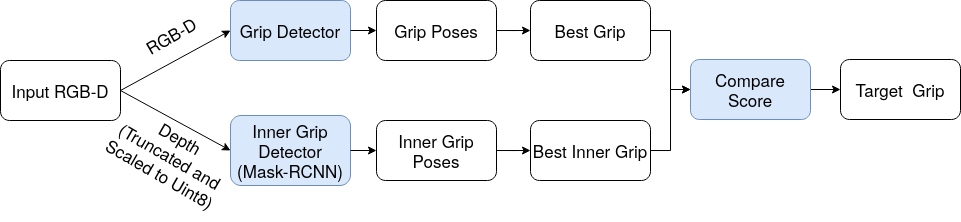
1. Output format
Field |
Description |
grip |
num_grip x 10 nd.array where a grip g=[xc,yc,zc,W, H, x0, y0, x1, y1, score]. (x0,y0) and (x1, y1) are 2 endpoints of the grip |
inner_grip |
num_grip x 4 where a grip g=[xc, yc, zc, w, score] |
best_ind |
best grip index of grips |
best_inner_ind |
best grip index of inner grips |
best_n_inds |
top n indexes of grips |
best_n_inner_inds |
top n indexes of inner grips |
target |
target grip selected from all grips and inner grips |
target_name |
name of target grip [grip/inner_grip] |
im |
display grip on the input image |
2. Create and Load Detector
Using the default Kpick’s detector
from kpick.pick.grip_inner_outer import get_inner_outer_grip_detector_obj detector = get_inner_outer_grip_detector_obj()(cfg_path=cfg_path)
Note
Please refer configs/inner_outer_grip.cfg
3. Modify and Load Detector
Extending the default Kpick’s detector
from kpick.pick.grip_inner_outer import get_inner_outer_grip_detector_obj, InnerOuterGripDetector class AppDetector(InnerOuterGripDetector): def new_function(self): print('new function') detector = get_inner_outer_grip_detector_obj(Detector=AppDetector)(cfg_path=cfg_path)
4. Demo on single RGB-D image
import cv2
from ketisdk.vision.utils.rgbd_utils_v2 import RGBD
# load model
detector = get_inner_outer_grip_detector_obj()(cfg_path='configs/inner_outer_grip.cfg')
# load image
rgb = cv2.imread('data/test_images/inner_outer_grip_rgb.png')[:, :, ::-1]
depth = cv2.imread('data/test_images/inner_outer_grip_depth.png', cv2.IMREAD_UNCHANGED)
rgbd = RGBD(rgb=rgb, depth=depth, depth_min=600, depth_max=800,
denoise_ksize=detector.args.sensor.denoise_ksize)
rgbd.set_workspace(pts=[(360, 270), (889, 273), (890, 635), (359, 632)])
# predict
detector.args.flag.show_steps = True
ret = detector.detect_and_show(rgbd=rgbd)
# show
cv2.imshow('reviewer', ret['im'][:, :, ::-1])
cv2.waitKey()
5. Parameters tuning
Parameter |
Description |
grip_net.erode_h |
gripper plate’s width |
grip_net.grip_w_ranges |
ranges of gripper’s width, which are tuned for each target object |
grip_net.grad_thresh |
gradient threshold. Smaller value makes more grip candidates but noisy, and vice versa |
grip_net.remove_bg |
remove detected grips on the background or not |
grip_net.top_n |
top n target grips |
grip_net.dy |
Smaller value makes more dense grip candidates. |
grip_net.ellipse_axes |
Dimensions of ellipse that examines neighbor grips. For bigger object, dimension should be larger |
inner_grip_net.score_thresh |
Score threshold of inner grip detector |
Hybrid Grasp Detection

1. Output format
Field |
Description |
grip |
num_grip x 10 nd.array where a grip g=[xc,yc,zc,W, H, x0, y0, x1, y1, score]. (x0,y0) and (x1, y1) are 2 endpoints of the grip |
best_ind |
best grip index of grips |
best_n_inds |
top n indexes of grips |
im |
display grip on the input image |
2. Create and Load Detector
Using the default Kpick’s detector
from kpick.pick.hybrid_grasp import get_hybrid_grasp_detector_obj detector = get_hybrid_grasp_detector_obj()(cfg_path=cfg_path)
Note
Please refer configs/hybrid_grasp.cfg
3. Modify and Load Detector
Extending the default Kpick’s detector
from kpick.pick.hybrid_grasp import get_hybrid_grasp_detector_obj, HybridGraspDetector class AppDetector(HybridGraspDetector): def new_function(self): print('new function') detector = get_hybrid_grasp_detector_obj(Detector=AppDetector)(cfg_path=cfg_path)
4. Demo on single RGB-D image
import cv2
from ketisdk.vision.utils.rgbd_utils_v2 import RGBD
# load model
detector = get_hybrid_grasp_detector_obj()(cfg_path='configs/hybrid_grasp.cfg')
# load image
rgb = cv2.imread('data/test_images/hybrid_grasp_rgb.png')[:, :, ::-1]
depth = cv2.imread('data/test_images/hybrid_grasp_depth.png', cv2.IMREAD_UNCHANGED)
rgbd = RGBD(rgb=rgb, depth=depth, depth_min=400, depth_max=600,
denoise_ksize=detector.args.sensor.denoise_ksize)
rgbd.set_workspace(pts=[(360, 270), (889, 273), (890, 635), (359, 632)])
# predict
detector.args.flag.show_steps = True
ret = detector.detect_and_show_hybrid(rgbd=rgbd)
# show
cv2.imshow('reviewer', ret['im'][:, :, ::-1])
cv2.waitKey()
5. Parameters tuning
Parameter |
Description |
grip_net.erode_h |
gripper plate’s width |
grip_net.grip_w_ranges |
ranges of gripper’s width, which are tuned for each target object |
grip_net.grad_thresh |
gradient threshold. Smaller value makes more grip candidates but noisy, and vice versa |
grip_net.remove_bg |
remove detected grips on the background or not |
grip_net.top_n |
top n target grips |
grip_net.dy |
Smaller value makes more dense grip candidates. |
grip_net.ellipse_axes |
Dimensions of ellipse that examines neighbor grips. For bigger object, dimension should be larger |
suction_net.pad_sizes |
Patch sizes of suction pose scanning process. Larger value should be set for larger object |
suction_net.stride |
Stride of suction scanning process. Smaller value makes more suction candidates, but computational heavier. |
rpn.enable |
Enable RPN for suction detector or not |
Depth completion of transparent objects
1. Testing on existing solution
Model: TransCG: A Large-Scale Real-World Dataset for Transparent Object Depth Completion and A Grasping Baseline
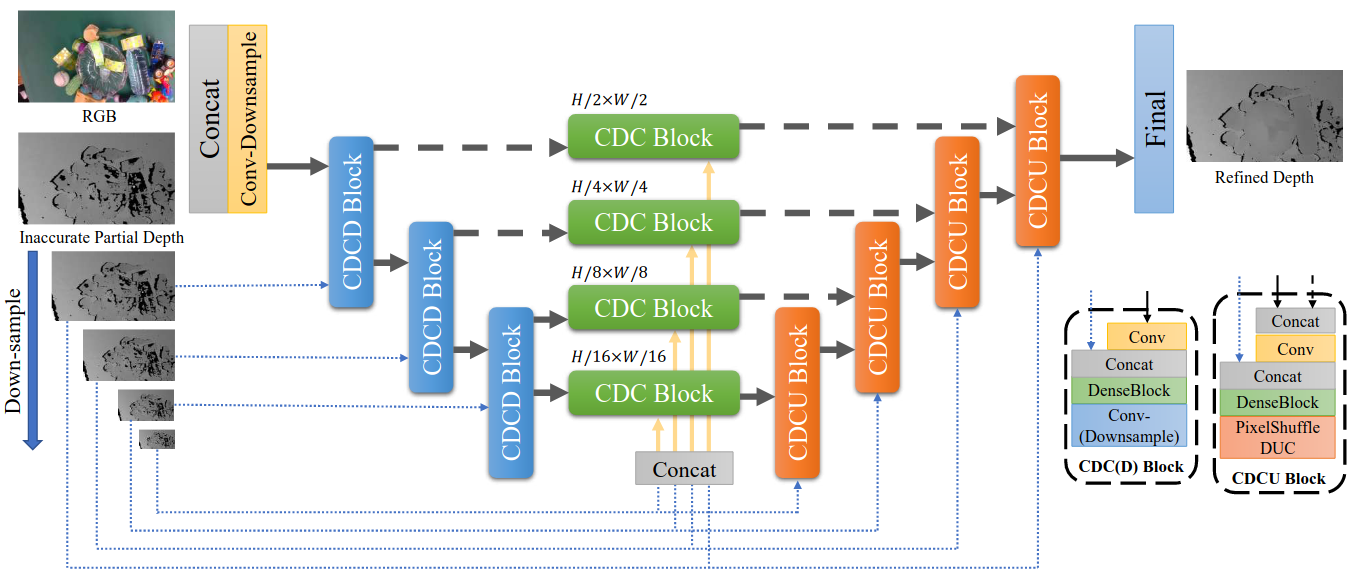

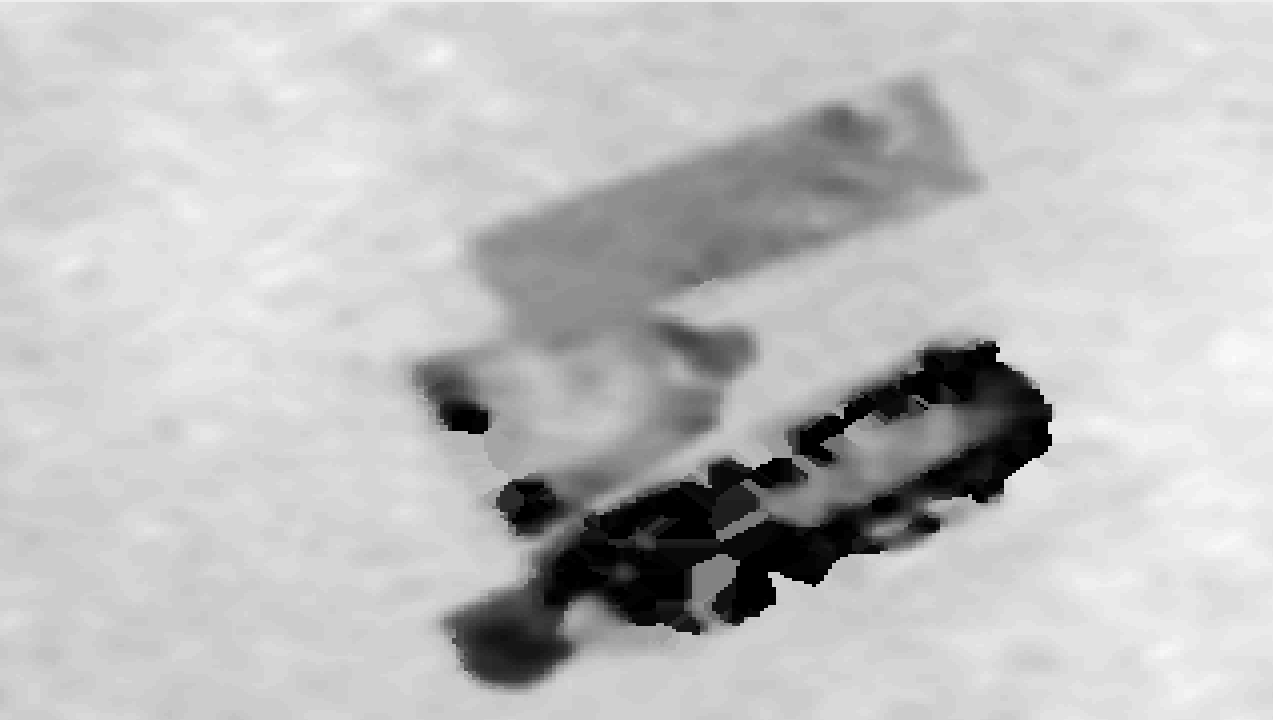
Input RGB and depth imgaes
Output depth